Chaque année, les hôpitaux d'Europe
sont de plus en plus confrontés à de nouvelles inquiétudes en termes de
ressources, car la population vieillissante et des attentes plus élevées
augmentent la pression sur les services de santé. La technologie est
l'une des méthodes possibles pour résoudre la «quadrature du cercle» qui
consiste à améliorer la qualité des opérations chirurgicales tout en
s'assurant que de tels services restent accessibles pour les patients.
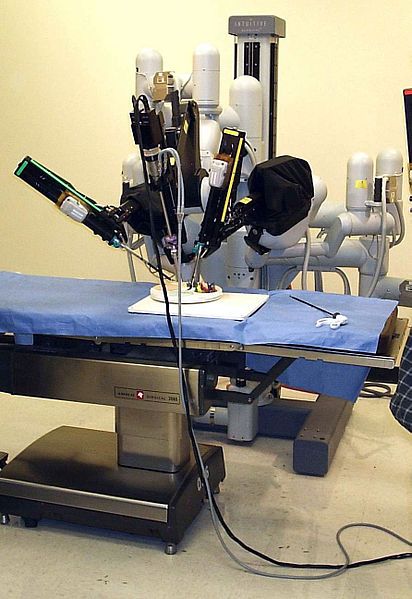
Ce constat explique la croissance des investissements de la
recherche de l'UE dans la chirurgie robotisée. Les chercheurs espèrent
commercialiser bientôt des technologies permettant d'automatiser les
opérations, ou des bras robots permettant d'opérer à distance, sous le
contrôle d'un chirurgien pouvant se trouver à des milliers de kilomètres
du patient. Ces perspectives semblent très excitantes, mais il reste
une longue route à parcourir avant de trouver ces technologies dans
votre hôpital local.
Paolo Fiorini, précédemment scientifique à la NASA, a passé plus de
20 années à rapprocher les institutions de recherche et à encourager la
commercialisation de nouvelles technologies. Avec son dernier projet
EUROSURGE, il vise à mettre en place une communauté européenne de
chercheurs, à simplifier le développement de logiciels, et à créer une
plateforme en ligne pour servir de voix aux chercheurs de ce secteur.
Dans un entretien exclusif accordé au magazine research*eu consacré
aux résultats, le Dr Fiorini explique les difficultés rencontrées par
les scientifiques de l'UE ainsi que ses espoirs pour le futur de ce
domaine de recherche prometteur.
Quels sont les principaux objectifs du projet EUROSURGE?
EUROSURGE est une action de coordination qui vise à former une
communauté de laboratoires de recherche et d'entreprises dans le domaine
de la chirurgie assistée par robotique, souvent appelée chirurgie
robotisée. Parallèlement à la constitution de la communauté, j'ai
considéré qu'il fallait aussi viser les difficultés de la 'robotique
cognitive', l'un des principaux centres d'intérêts de la robotique dans
le 7e PC.
Qu'il a-t-il de nouveau ou d'innovant dans ce projet et comment aborde-t-il ce sujet?
Pour bâtir une communauté de chercheurs, j'ai pensé qu'il était
nécessaire de développer les méthodes pour s'assurer qu'ils pourront
coopérer, peut-être sur une plateforme commune matérielle et logicielle.
Bien qu'une action de coordination n'ait pas les fonds pour développer
des plateformes matérielles, nous avons géré plusieurs problèmes en
rapport avec les objectifs du projet.
Dans une première étape, nous avons étudié 'qui fait quoi' en
Europe, en matière de chirurgie robotisée. Nous avons réalisé une carte
qui relie tous les centres conduisant des recherches dans ce domaine,
avec leur principal sujet d'étude. Cette carte est déjà utilisée pour
identifier des partenaires et des réviseurs potentiels de projets
européens.
La deuxième étape a été de mettre au point les méthodes pour
simplifier le développement des logiciels destinés à la chirurgie
robotisée. Le principe ici est celui de modularité, afin que différents
groupes puissent écrire des composants compatibles avec le logiciel
développé dans d'autres laboratoires. Nous avons proposé des directives
pour la conception et l'implémentation des packages logiciels.
Pour satisfaire aux réglementations très strictes des appareils
médicaux, le logiciel doit passer par des phases de test et de
validation très exigeantes. À notre sens, la conception doit être basée
sur l'ontologie, c'est-à-dire sur une description formelle des fonctions
et des connexions des composants d'un système de chirurgie robotisé,
couplée avec la description des tâches que le système effectuera.
L'implémentation doit être basée sur des composants, dont les
spécifications peuvent être dérivées automatiquement de la description
ontologique. Nous sommes partis des packages ROS et OROCOS, déjà bien
connus et utilisés en robotique, et nous les avons renforcés par le
concept de 'superviseur de composant', qui permet à chaque package
logiciel de s'identifier, ainsi ses fonctions, auprès des autres
composants, puis de permettre à un script de test de vérifier que les
composants sont tous compatibles.
Le dernier point abordé par EUROSURGE est l'analyse des problèmes
'non techniques', par exemple associés à un langage commun, aux brevets,
aux réglementations, aux normes d'éthique et aux lois en vigueur dans
les différents pays d'Europe. Pour cela, nous avons mis en place le
nouveau site web SurgiPedia, qui publie des livres blancs et des
déclarations sur la chirurgie robotisée, et propose un moteur de
recherche dédié pour collecter des informations sur les brevets en
rapport avec ce domaine.
Qu'est-ce qui vous a incite à explorer ce domaine?
De 1985 à 2000, j'ai travaillé sur la télé-opération pour
l'exploration spatiale au Jet Propulsion Laboratory de la NASA à
Pasadena (en Californie). De retour en Italie en 2001, j'ai constaté le
peu d'intérêt envers la recherche spatiale, et après quelques tentatives
pour travailler avec l'Agence spatiale italienne, j'ai décidé
d'appliquer à la chirurgie robotisée mes compétences en téléopération.
C'était une bonne idée car j'ai pu participer à plusieurs projets dans
ce domaine, en coordonner certains, développer de nouvelles technologies
et former des étudiants. J'ai aussi lancé quelques entreprises
spécialisées dans les technologies de chirurgie assistée par robotique.
Quelles sont les principales difficultés que vous avez rencontrées pour faire avancer la chirurgie robotisée?
Bien entendu, les principales difficultés ne sont pas celles d'ordre
technique. Il s'agit essentiellement de l'absence d'un flux continu de
ressources pour arriver à une technologie suffisamment mature. Ce fut le
cas de l'une des entreprises que j'ai lancées: après les bons résultats
du projet européen ACCUROBAS, j'ai décidé d'appliquer l'expérience
acquise pour construire un nouveau robot chirurgien capable de résoudre
certaines des problèmes identifiés durant le projet. J'ai obtenu un
capital risque notable, mais insuffisant pour arriver jusqu'à la
commercialisation. Nous avons réussi à mettre au point le nouveau
produit, à conduire des tests sur les animaux et à certifier la
technologie, puis les fonds ont manqué et nous n'avons pas trouvé
d'autres investisseurs pour soutenir les essais cliniques sur l'homme.
C'est un problème fréquemment rencontré par les projets européens. Nous
concevons de belles technologies, mais elles n'ont aucun impact sur
l'économie car elles n'atteignent jamais le marché. Espérons que ce
problème sera géré par Horizon 2020, mais il n'y a pas de solution
simple, vu le manque de capital risque en Europe.
Le deuxième problème est qu'il est difficile de trouver des
chirurgiens intéressés par une coopération 'sérieuse' à un projet
d'ingénierie. Ils sont tous intéressés au début, mais quand nous avons
besoin d'eux et de leur temps pour tester les appareils, donner leur
avis ou proposer de nouvelles fonctions, ils disparaissent. Je suppose
que le fait qu'un prototype soit encore trop éloigné de l'utilisation
leur fait perdre tout intérêt pour le processus de développement.
Qu'attendez-vous d'EUROSURGE sur ce point?
Je pense qu'outre les points indiqués précédemment, nous avons très
bien réussi à créer une communauté de chercheurs en chirurgie robotisée.
Je n'irai pas jusqu'à dire que tout le monde est impliqué et participe
aux activités du projet, mais c'est vrai pour un bon nombre des
chercheurs. Nous avons tenu à Vérone un atelier réussi, suivi par
environ 70 chercheurs, et nous avons eu un stand à l'exposition
international de robotique iREX à Tokyo, où j'ai présenté les principaux
résultats des programmes de l'UE qui travaillent sur la chirurgie
robotisée. Ainsi, nous avons pu impliquer des chercheurs qui ne
participent pas au projet EUROSURGE, et nous avons établi d'excellentes
relations avec tous.
Nous espérons qu'après la fin du projet, les partenaires
continueront de développer l'atelier, le site Surgipedia avec son moteur
de recherche sur les brevets, les approches de conception et
d'implémentation du logiciel, et les méthodes de validation. Et nous
espérons tous que nous aurons un autre projet financé par l'UE et
pourrons donc continuer cette initiative.
Quels sont les prochains sujets de vos travaux?
J'ai un autre projet actif, concernant l'automatisation en chirurgie
robotisée. Il s'agit du projet I-SUR. Nous concevons des technologies
pour automatiser certains actes simples comme perforer, couper ou
suturer. Là aussi, nous avons à peine effleuré le problème et l'an
prochain nous essaierons d'obtenir des fonds pour continuer les
recherches. SAFROS, un autre projet récemment terminé, a souligné la
nécessité d'une meilleure formation en chirurgie robotisée. Nous avons
donc lancé une nouvelle entreprise pour commercialiser le logiciel de
formation XRON (http//:metropolis.scienze.univr.it/xron), afin de
réduire les risques d'accident lors des interventions assistées par
robotique. Finalement, le plus difficile est de poursuivre le
développement du robot chirurgical. Il existe un important besoin pour
de nouveaux produits, mais rien n'est disponible sur le marché.
Source: Uniwersytet w Weronie
Référence du document: D'après un entretien avec Paolo Fiorini, coordinateur du projet EUROSURGE







 EN
EN CS
CS DE
DE ES
ES FR
FR HU
HU IT
IT PL
PL PT
PT РУ
РУ SK
SK TR
TR УК
УК AR
AR 中文
中文